Launching nodes:启动节点
创始人
2025-05-30 07:59:53
文章目录
- 背景介绍
- 运行一个启动文件
- (可选)控制Turtlesim节点
参考官方文档: Launching nodes
背景介绍
在大多数介绍性教程中,你一直在为你运行的每个新节点打开新终端。随着你创建的系统越来越复杂,同时运行的节点越来越多,打开终端和重新输入配置细节变得很乏味。
启动文件允许你同时启动和配置一些包含ROS 2节点的可执行文件。
用 ros2 launch 命令运行一个单一的启动文件将一次性启动你的整个系统——所有节点和它们的配置。
运行一个启动文件
打开一个新的终端并运行命令:
ros2 launch turtlesim multisim.launch.py
该命令将运行以下启动文件:
# turtlesim/launch/multisim.launch.pyfrom launch import LaunchDescription
import launch_ros.actionsdef generate_launch_description():return LaunchDescription([launch_ros.actions.Node(namespace= "turtlesim1", package='turtlesim', executable='turtlesim_node', output='screen'),launch_ros.actions.Node(namespace= "turtlesim2", package='turtlesim', executable='turtlesim_node', output='screen'),])
上面的启动文件是用Python写的,但你也可以用XML和YAML来创建启动文件。你可以在Using Python, XML, and YAML for ROS 2 Launch Files中看到这些不同的ROS 2启动格式的比较。
这将运行两个turtlesim节点:
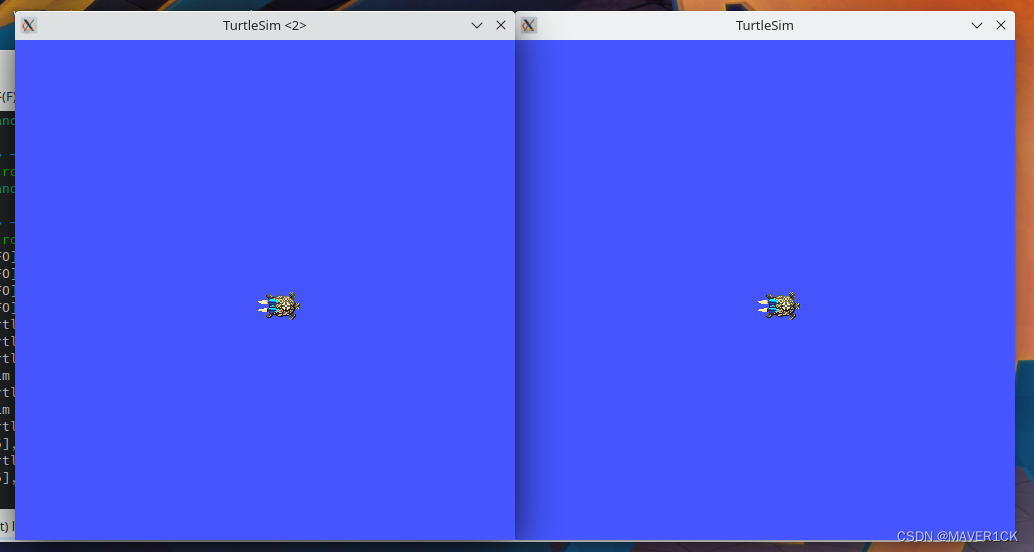
现在,不要担心这个启动文件的内容。你可以在ROS 2 launch tutorials中找到更多关于ROS 2启动的信息。
(可选)控制Turtlesim节点
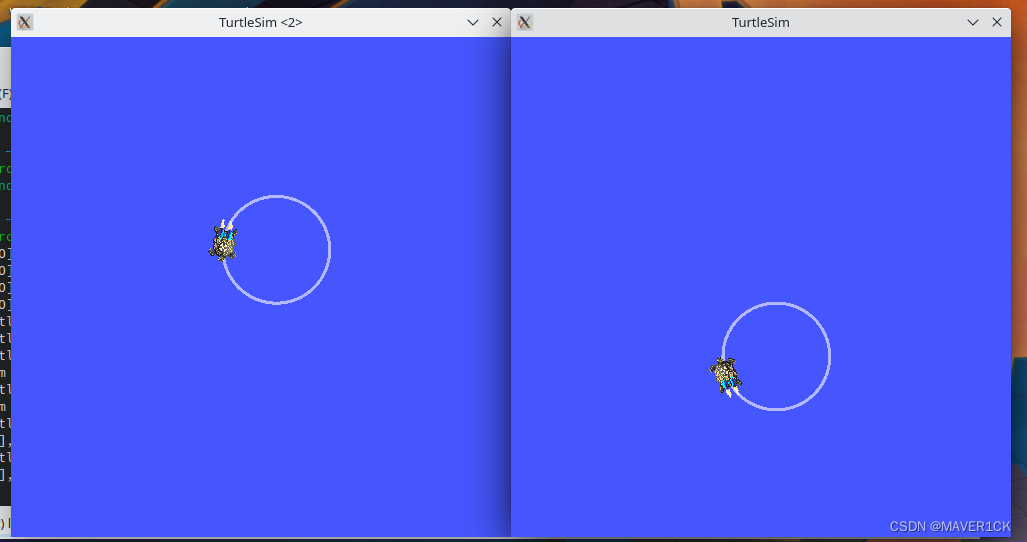
现在,这些节点正在运行,你可以像其他ROS 2节点一样控制它们。例如,你可以通过打开两个额外的终端并运行以下命令使乌龟向相反的方向运动。
在第二个终端中:
ros2 topic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
在第三个终端中:
ros2 topic pub /turtlesim2/turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: -1.8}}"
效果如下:
关于ROS 2启动文件的更多教程,请参见启动文件教程主页面main launch file tutorial page。
相关内容
热门资讯
超60万人的体面
2026年伊始,北京通州的一个住宅小区里,裴云涛正带着他的“小兄弟”穿梭在楼宇间。那是一个无人快递车...
美总统特使:美国倾向于通过外交...
当地时间16日,总台记者获悉,美国总统特使威特科夫此前在美国接受采访时,披露了有关加沙地带未来、与巴...
联特科技:授权管理层启动H股发...
1月16日,联特科技(301205.SZ)公告称,公司于2026年1月16日召开董事会,审议通过授权...
四川大决策投顾:全球电网投资加...
四川大决策投顾 摘要:特高压行业是能源转型的核心载体,其投资逻辑清晰:在“双碳”目标下,西部新能源大...