simulink simscape驱动方式总结
创始人
2025-05-31 20:15:55
驱动方式分类
贴出官方文档的一张图:
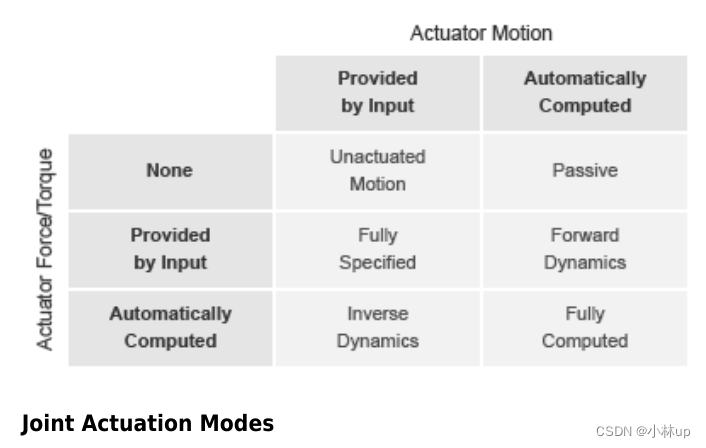
其中这两个是最常用的:
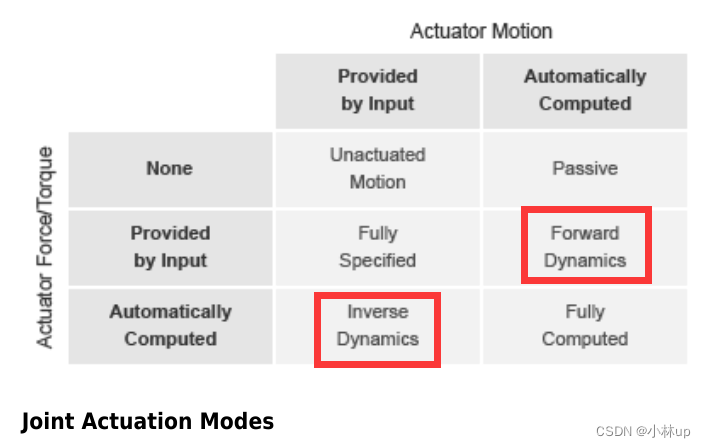
求解机器人正运动学使用的是(求解逆动力学,给输入角度,力矩自动计算):

而如果给定力和力矩,计算机器人的运动姿态,就是正动力学

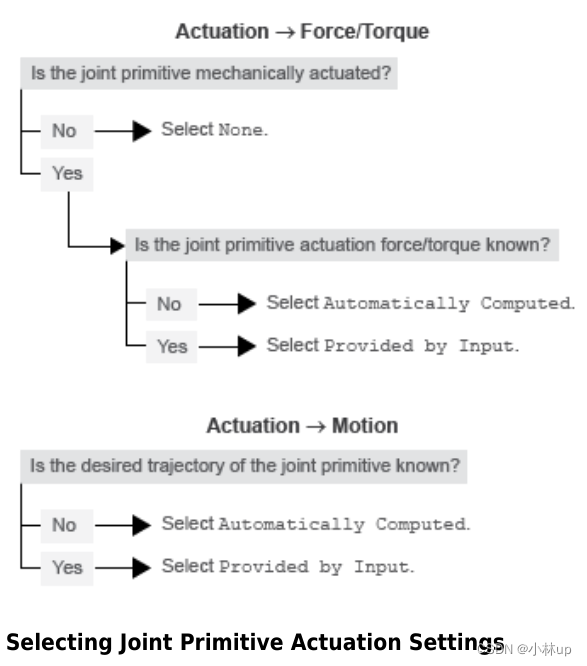
怎么选择驱动方式
我们到底是用正动力学还是逆动力学,我们要回答两个问题:
- 运动副是机械驱动吗?(已知驱动力force/驱动力矩torque与否)
- 运动副的运动轨迹是否已知?(已知运动motion与否)
我们的设置根据上面两个问题来:
运动的输入
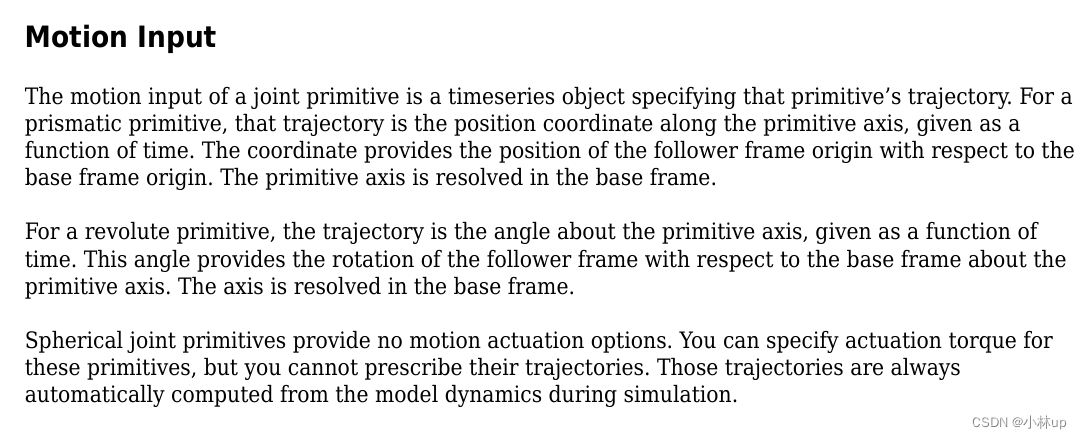
移动副:和初始位置相比移动的距离
转动副:和初始位置相比旋转的角度
球面副:没有定义,可以通过定义它的输入力矩来自动定义运动。
常用的快捷键
快捷键:
Ctrl+T 查看运动输入状态
Ctrl+D 查看初始状态(未输入)
其他
设计仿真的时候不能有冗余的自由度,因为这会有多解。运动的自由度的数量需要和力/力矩的自由度的数量一致。
参考
《Simscape User Guide》3-20 ~ 3-26
上一篇:冲击蓝桥杯-时间问题(必考)
相关内容
热门资讯
12岁女孩被虐待致死案新进展:...
新京报记者 赵露 制作 礼牧周 ▲新京报我们视频出品(ID:wevideo) 12月17日,记者从被...
2025年阿坝全州接待游客预计...
12月17日,阿坝州“全域旅游示范引领专场”发布会在汶川县举行,州文广旅局党组成员、副局长张艳介绍2...
工商变更!余承东出任华为终端公...
据国家企业信用信息公示系统显示,12月12日,华为终端有限公司发生工商变更,郭平卸任董事长,由余承东...